
















| 品牌 : | 上海文圣 | 型号 : | VS-IRHJ03 |
| 加工定制 : | 是 | 适用范围 : | 焊接与抛光工业机器人 |
| 特色服务 : | 维修一年 | 电工电器设备名称 : | 焊接与抛光工业机器人综合实训箱 |
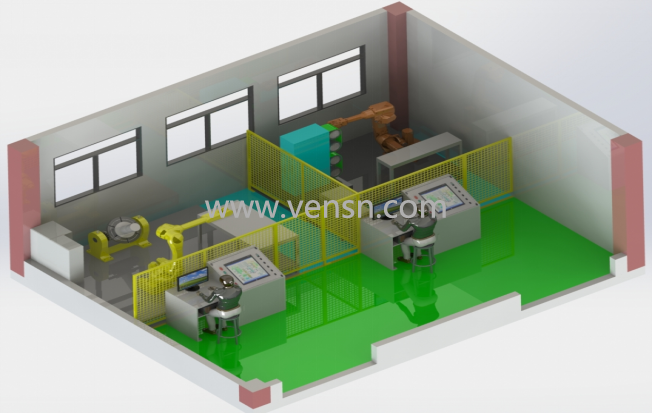
VS-IRHJ03型 焊接与抛光工业机器人综合实训平台
一、整机技术参数
(一)机器人焊接工作站
1、供电电源:国家标准用电AC220V±10%/50Hz;
2、工作环境:温度-10℃~40℃ 相对湿度≤85%(25℃)海拔<4000m;
3、装置容量:<5kVA;
4、外形尺寸:2400mm*3800mm*1800mm(L*W*H);
焊接工作站占地大小约2.4m×3.8m,所有的货物只能通过电梯或者楼梯运上楼。(特别说明:实验室门的尺寸为高2m,宽1.6m;电梯的尺寸为高2m,宽1.45m,深2.4m;工作站存放的地点为2楼,不具备深钻孔的条件,地面到天花板的高度为3.0m。)
(二)机器人抛光打磨工作站
1、供电电源:国家标准用电AC380V±10%/50Hz;
2、工作环境:温度-10℃~40℃ 相对湿度≤85%(25℃)海拔<4000m;
3、装置容量:<15kVA;
4、外形尺寸:2300mm*2600mm*1800mm(L*W*H);
打磨工站车间占地大小约2.3M×2.6M,所有的货物只能通过电梯或者楼梯运上楼。(特别说明:实验室门的尺寸为高2m,宽1.6m;电梯的尺寸为高2m,宽1.45m,深2.4m;工作站存放的地点为2楼,不具备深钻孔的条件,地面到天花板的高度为3.0m。)
二、主要配置及性能参数
(一)BDT-131A-M10iA机器人焊接工作站
1、设备组成
由1台6关节发那科M-10iA工业机器人(含机器人控制器、示教器和离线编程软件)、1套焊机、1台焊接变位机、1个多功能焊接平台、1个金属系统大底板、1套保护围栏、1台品牌电脑、电脑桌凳、各类焊接胚件500套以上,配备一定数量的焊丝,配备必要的维修工具,其他配件。
2、功能特点
本工作站为机器人自动化焊接示教工作站,能完成简单工件和复杂工件的立体焊接功能,包含点焊、直线和圆弧的焊接。
工作站共配有两种焊接模式,一种是由机器人和多功能工作台组成的焊接模式,二种是由机器人和变位机组成的焊接模式。
一种模式主要用于展示机器人对固定不动的工件进行焊接的过程,能完成的焊接动作有:
(1)钢片对接:把两片钢片水平或者垂直对接在一起固定,在其对接处焊接使其合二为一。
(2)直角钢片对接:把两片相同的直角钢片(角铁)对接在一起固定,在其对接处焊接使其合二为一。
(3)钢片曲面对接:把两片相同的弯曲的钢片使其对接在一起固定,在其对接处焊接使其合二为一。
二种模式主要用于展示机器人对需要翻转的复杂工件进行焊接的过程。实际生产过程中部分工件因为过于庞大或者形状复杂,需要在焊接的过程中进行翻转才能完成焊接工序,此时这可以把工件固定在变位机上。在焊接的过程中变位机进行翻转,配合机器人完成焊接工作。
3、主要配置及技术参数
焊接效果
焊缝宽度6-12mm,焊缝高度1-4mm,焊接产品板厚3-4mm,焊缝均匀,无气孔,无未熔合。
M-10iA六关节工业机器人
采用发那科M-10iA六关节工业机器人,手腕负载12Kg,臂展1420mm,重复定位精度±0.08mm,配套工业机器人控制器及示教器。

(M-10iA工业机器人焊接应用实物图及工作范围图)
4、主要技术参数
| *大负载:12Kg | 工作自由度:6自由度 | |||
| 位置重复定位精度:±0.08mm | 安装方式:置地式 | |||
| 配套机器人固定底板 | 本体重量:130Kg | |||
| 轴 | 动作范围 | *大速度 | 负载能力 | |
| 1 | 轴1(J1回转) | 340° | 230°/s | 22.0N.m |
| 2 | 轴2(J2回转) | 250° | 225°/s | 22.0N.m |
| 3 | 轴3(J3回转) | 340° | 230°/s | 9.8N.m |
| 4 | 轴4(J4旋转) | 445° | 430°/s | 0.65Kg.㎡ |
| 5 | 轴5(J5摆动) | 380° | 430°/s | 0.65Kg.㎡ |
| 6 | 轴6(J6旋转) | 720° | 630°/s | 0.17Kg.㎡ |
| 安装条件 | 1.环境温度:0~45℃ 2.环境湿度:通常在75%RH以下(无结露) 3.振动加速度:4.6m/S2(0.5G)以下 | |||
5、机器人控制器及示教器
| 物料名称 | 主要技术参数 | 实物图 |
| 机器人控制器 | 1.型号:R-30iA Mate 2.特点:集中了发那科各种*先进的新一代机器人控制器,具有性能高,响应快,安全性能强等特点。 作为集成了视学功能的机器人控制器,将大量节约为实现柔性生产所需的周边设备成本。基于FANUC自身软件平台研发的各种功能强大的点焊、涂胶、搬运等专用软件,在使机器人的操作变得更加简单的同时,也使系统具有彻底免疫计算机病毒的功能。 |  |
| 机器人示教器 | 1.型号:iPendant 2.特点: 2.1减轻了自重,并通过巧妙的设计改变了示教盒的重心,改善了整体的平衡性,使示教、操作变得更轻松; 2.2通过金属接头及塑料护套加强了电缆接头处的防护,再也不用担心由于拉拽刮擦造成的电缆损坏; 2.3增加了附加轴切换的快捷键及电源指示灯,简化了操作步骤; 2.4可在示教盒上选装USB借口,使程序的备份导入变得更方便; |  |
YT-350GR焊机
焊机和工业机器人匹配;采用松下YT-350GR焊接电源,通过全数字控制,从小电流领域到大电流,都能对电流状态进行极其精细的控制,实现持续稳定的焊接品质。采用两个高速演算CPU,实现数字控制下应答的高速化,通过电流波形控制,有效抑制短路上升电流,改善短路过渡特性。实现多种焊丝低飞溅焊接的全数字焊机,通过全数字控制,从小电流领域到大电流,都能对电流状态进行极其精细的控制,实现持续稳定的焊接品质。
配套松下YW-35DG1HAE送丝装置,采用2驱2从两点送丝方式,送丝力强劲,能适应不同规格的。配置编码器,能有效的保准送丝电机的精准送给。搭配YX-25CD1HAM气体调节器,能实时能却焊接温度。采用松下CO2/MAG焊接用风冷式YT-35CS3VTA,能有效提高焊接质量与速度。全数字技术,全数字电源配合数字送丝机,实现全电流范围内的高品质焊接;具有机器人专用机型、专机数字通讯机型、iWeld联网机型等多种专门机型;

(YT-GR350焊机连接方式及实物图,图片仅供参考)
| 物料名称 | 主要技术参数 | 实物图(仅供参考) |
| YD-350GR 焊接电源 | 1.控制方式:数字控制IGBT逆变; 2.额定输入电压:AC380V 50/60Hz; 3.额定输入容量: 14KVA; 4.额定负载持续率:60%; 5.焊接方式:一元化自动调节; 6.绝缘等级:H级; 7.冷却方式:强制风冷; 8.适用焊丝:实芯0.8/0.9/1.0/1.2; 9.存储器:存储9组焊接专家数据; 10.波形控制方式:数字控制-7—7; 11.保护气:焊接、MAG焊接、MIG焊接; 12.气体检查时间:≤60S; 13.点焊时间:0.3-10.0连续调节(0.1S递增) 14.外形尺寸:380*550*645mm; |  |
| YW-35DG1HAE送丝装置 | 1..CO2/MAG焊接用风冷式 2.适用焊丝:实芯0.8/0.9/1.0/1.2; 3.送丝方式:2驱动2从动 4.送丝速度:10rpm~166rpm 5.反馈方式:编码器反馈 6.额定电流:350A 7.额定负载持续率:CO2:60%;MAG:35% |  |
| YT-35CS4HAE风冷式 | 1.CO2/MAG焊接用风冷式 2.焊接电流:350A; 3.负载持续率:连续; 4.适用焊丝:实芯焊丝,药芯焊丝; 5.适用焊丝直径:0.8/1.0; 6.电缆长度:3米; 7.重量:2.8Kg; 8.形状:θ=55°、R=80mm、L=121mm; |  |
| YX-25CD1HAM气体调节器 | 1.产品名称:气体流量减压器 2.单级式减压结构; 3.2”压力表; 4.流量管及护罩采用高强度抗冲击材料制作而成,安全耐用; |  |
Positioner焊接变位机
可以通过工作台的回转和翻转,使待焊处置于合适位置,很好的和焊接设备结合使用,实现焊接的自动化,机械化,提高生产效率和焊接质量。概括来讲焊接变位机就是移动工件,使之待焊部位处以合适易焊接的位置的焊接辅助设备。选择合适的焊接变位机能提高焊接质量及生产效率,降低工人的劳动强度及生产成本,加强安全文明生产,有利于现场管理。
| 物料名称 | 主要技术参数 | 实物图(仅供参考) |
| Positioner焊接变位机 | 1.可以在水平和垂直两个方向旋转. 2.*大负载:500KG 3.电机采用伺服电机:J4系列 4.伺服采用光纤连接,具有实时监测变位运动参数 5.运动范围:740度Continuous Turn abailable 6.*大速度:160度/秒 7.*大扭力:36kgf.m 8.*大惯量:2350kgf.cm.s2 |  |
BDT-131A-HJPT多功能焊接平台
机器人前方设置一张大的焊接平台,可在焊接平台上添加各种工装夹具,用于实现各种焊接的教学功能。
| 物料名称 | 主要技术参数 | 实物图(仅供参考) |
| BDT-131A-HJPT多功能焊接平台 | 1.用厚钢板做成,表面光滑平整,平面度高,工作台平面配有均布的圆孔; 2.配合专用的夹具可以把焊接件牢固地固定在工作台上; 3.可在焊接平台上添加各种工装夹具,用于实现各种焊接的教学功能; |  |
BDT-132A-XTDB系统大底板
| 物料名称 | 主要技术参数 | 实物图(仅供参考) |
| BDT-132A-XTDB系统大底板 | 1.由金属制造,材质为Q235,尺寸为2800*2200*110mm(*大10%的误差); 2.用于固定机器人、变位机等;具备用于搬运的叉车卡位;系统大地板具备足够的重量,不需要和地板钻孔连接,就可以保证整个工作站工作时不晃动。 |  |
BDT-131A-BHWL安全护栏
| 物料名称 | 主要技术参数 | 实物图(仅供参考) |
| BDT-131A-BHWL安全护栏 | 1.工业型安全护栏,金属网状结构; 2.为了保障人身安全,工作站的四周配备保护围栏,透过围栏可以看清里面的工作站; 3.具备开门报警指示功能; |  |
Vostro 3650-R1938电脑
| 物料名称 | 主要技术参数 | 实物图(仅供参考) |
| 惠普Vostro 3650-R1938 | 1.处理器类型:第三代酷睿i7,64位处理器 2.核心数量、线程:四核,八线程 3.处理器频率:3.4-3.9GHz 4.三级缓存:L3 8M 5.总线类型:DMI总线5.0GT/s 6.主板/芯片组:Intel Q75 7.内存:8G DDR3 1333 8.硬盘:1TG SATA2,7200转 9.显卡:独立显卡,显存容量1G,集成AMD Radeon HD 7450 10.光驱:DVD刻录机,支持DVD SuperMulti双层刻录 11.显示器:宽屏液晶,21.5寸,分辨率:1920*1080 12.声卡:板载声卡 13.网卡:板载10-100-1000M网卡 14.视频接口:VGAHDMI接口 15.尺寸:H350 x W154 x D278.4毫米 |   |
BDT-131A-Q电气控制
| 物料名称 | 主要技术参数 | 实物图(仅供参考) |
| BDT-131A-Q电气控制系统 | 1.总控系统采用PLC控制,品牌为三菱Q系列,预留20%I/O点数;提供对应PLC的编程软件和编程电缆 2.PLC与机器人采用网络通信,并具有信号扩展功能 3.断路器采用ABB,继电器采用西门子APT |  |
| BDT-131A-DKG电气控制柜 | 电气控制柜采用优质钣金制作而成,表面特色化学处理,具备防锈、防潮、防腐蚀等性能; | |
| BDT-131-DNZ电脑桌 | 用优质钣金制作而成,表面特色化学处理,与电气控制柜安装一体; |
尺寸说明
焊接工作站占地大小约2.4m×3.8m,所有的货物只能通过电梯或者楼梯运上楼。(特别说明:实验室门的尺寸为高2m,宽1.6m;电梯的尺寸为高2m,宽1.45m,深2.4m;工作站存放的地点为2楼,不具备深钻孔的条件,地面到天花板的高度为3.0m。)
JEB-F26维修工具

(二)BDT-132A-IRB1600机器人抛光打磨工作站
1、设备组成
由1台6关节ABB-IRB1600工业机器人(含机器人控制器、示教器和离线编程软件)、1套力控打磨抛光机、1个多功能上下料台、机器人工装夹具、1个金属系统大底板、1套独立除尘装置、1套保护围栏、1台品牌电脑、电脑桌凳、打磨胚件(金属水龙头或者金属门把手)500个以上,配备必要的维修工具,其他配件。
2、功能特点
本工作站为机器人自动化打磨抛光示教工作站。
工作站利用机器人在上下料台的上料区抓取工件(金属水龙头)并在砂带机上进行打磨抛光,打磨抛光好以后放到上下料台的下料区。
打磨抛光机由驱动轮、从动轮、支撑张紧轮和电机,自动送蜡装置组成,根据不同的打磨抛光对象,砂带机可以灵活调整。
工作站工作过程如下:
Step1:人工人员将待加工的工件装到工作台上料边;
Step2:机器人抓取工件打磨抛光;
Step3:打磨抛光完成后放到工作台下料边。
3、主要配置及技术参数
打磨效果
表面粗糙度达到Ra 4μm以下。
IRB1600-10/1.45六关节工业机器人
采用ABB IRB1600-10/1.45六关节工业机器人,手腕负载10Kg,重复定位精度±0.02mm,行程1.45m,配套工业机器人控制器和示教器。


(IRB1600-10/1.2工业机器人抛光打磨应用及工作范围示意图,图片仅供参考)
4、主要技术参数
| *大负载:10Kg | 工作自由度:6自由度 | |||||
| 位置重复定位精度:±0.02mm | 安装方式:置地式 | |||||
| 配套机器人固定底板 | 本体重量:250Kg | |||||
| 轴 | 动作范围 | *大速度 | ||||
| 1 | 轴1(J1回转) | ±180° | 180°/s | |||
| 2 | 轴2(J2回转) | +150°~-90° | 180°/s | |||
| 3 | 轴3(J3回转) | +65°~-245° | 185°/s | |||
| 4 | 轴4(J4旋转) | ±200° | 385°/s | |||
| 5 | 轴5(J5摆动) | ±115° | 400°/s | |||
| 6 | 轴6(J6旋转) | ±400° | 460°/s | |||
| 安装条件 | 1.操作期间:+5℃至+45℃ 2.环境湿度:恒温下*高为95% 3.运存期间:-25℃至+55℃ | |||||
机器人控制器及示教器
| 物料名称 | 主要技术参数 | 实物图 |
| IRC5机器人控制器 | 1.控制器硬件:多处理器系统、PCI总线、大容量闪存盘、防掉电备用电源、U盘接口; 2.控制软件:成熟的实时操作系统、高级RAPID程序语言、PC-DOS文件格式预装软件(以DVD为载体); 3.安全性:安全停、紧急停、2通道安全回路监测、3位启动装置; 4.电源:单相220/230 V,50-60 Hz; |  |
| FlexPendan机器人示教器 | 1.彩色触摸屏; 2.操纵杆; 3.紧急停; 4.支持惯用左/右手切换; 5.支持U盘; |  |
BDT-PAS43B力控打磨抛光机
| 物料名称 | 主要技术参数 | 实物图 |
| BDT-PAS43B力控打磨抛光机 | 1.力控浮动范围:0-8mm 2.抛光工位配有自动送蜡装置 3.驱动电机:ABB品牌 4.具有尺寸检测功能,分辨率:0.04mm 5.具有耗材补偿功能 6.用途:成品去除毛刺;表面锈蚀处理;成品表面抛光;打磨洗净工作;、去除氧化薄膜(不会损害工件表面形状) |  |
BDT-132A-SLPT多功能上料平台
| 物料名称 | 主要技术参数 | 实物图 |
| BDT-132A-SLPT多功能上料平台 | 工作台采用箱体结构,内部可放一些工具或者打磨产品,工作台面分为2个区,上料区和下料区。 |  |
BDT-132A-RBJG机器人工装夹具
| 物料名称 | 主要技术参数 | 实物图 |
| BDT-132A-RBJG 机器人工装夹具 | 1.优质钢制作而成,能满足水龙头工件的吸取。通过气动电磁阀控制吸合; 2.工装夹具必须能够牢固的夹紧需要打磨抛光的工件(金属水龙头); |  |
BDT-132A-XTDB系统大底板
| 物料名称 | 主要技术参数 | 实物图(仅供参考) |
| BDT-132A-XTDB系统大底板 | 1.由金属制造,材质为Q235,尺寸为2800*2200*110mm(*大10%的误差); 2.用于固定机器人、打磨机等;具备用于搬运的叉车卡位;系统大地板具备足够的重量,不需要和地板钻孔连接,就可以保证整个工作站工作时不晃动。 | |
BDT-132A-XCQ独立除尘装置
| 物料名称 | 主要技术参数 | 实物图(仅供参考) |
| BDT-132A-XCQ 独立除尘装置 | 1.工业型安全护栏,金属网状结构; 2.为了保障人身安全,工作站的四周配备保护围栏,透过围栏可以看清里面的工作站; 3.具备开门报警指示功能; |  |
BDT-132A-BHWL安全护栏
| 物料名称 | 主要技术参数 | 实物图(仅供参考) |
| BDT-132A-BHWL安全护栏 | 1.用于吸收抛光打磨作业中产生的粉尘,以免对周围的环境造成影响,要求除尘装置除尘效果良好。 |  |
Vostro 3650-R1938电脑
| 物料名称 | 主要技术参数 | 实物图(仅供参考) |
| 惠普Vostro 3650-R1938 | 1.处理器类型:第三代酷睿i7,64位处理器 2.核心数量、线程:四核,八线程 3.处理器频率:3.4-3.9GHz 4.三级缓存:L3 8M 5.总线类型:DMI总线5.0GT/s 6.主板/芯片组:Intel Q75 7.内存:8G DDR3 1333 8.硬盘:1TG SATA2,7200转 9.显卡:独立显卡,显存容量1G,集成AMD Radeon HD 7450 10.光驱:DVD刻录机,支持DVD SuperMulti双层刻录 11.显示器:宽屏液晶,21.5寸,分辨率:1920*1080 12.声卡:板载声卡 13.网卡:板载10-100-1000M网卡 14.视频接口:VGAHDMI接口 15.尺寸:H350 x W154 x D278.4毫米 |  |
BDT-132A-Q电气控制
| 物料名称 | 主要技术参数 | 实物图(仅供参考) |
| BDT-132A-Q电气控制系统 | 1.总控系统采用PLC控制,品牌为三菱Q系列,预留20%I/O点数;提供对应PLC的编程软件和编程电缆 2.人机界面采用三菱2000系列; 3.PLC与机器人采用网络通信,并具有信号扩展功能 4.断路器采用ABB,继电器采用西门子APT |  |
| BDT-132A-DKG电气控制柜 | 电气控制柜采用优质钣金制作而成,表面特色化学处理,具备防锈、防潮、防腐蚀等性能; | |
| BDT-132-DNZ电脑桌 | 用优质钣金制作而成,表面特色化学处理,与电气控制柜安装一体; |
尺寸说明
尺寸要求:打磨工站车间占地大小约2.3M×2.6M,所有的货物只能通过电梯或者楼梯运上楼。(特别说明:实验室门的尺寸为高2m,宽1.6m;电梯的尺寸为高2m,宽1.45m,深2.4m;工作站存放的地点为2楼,不具备深钻孔的条件,地面到天花板的高度为3.0m。)
JEB-F26维修工具

三、详细配置清单
| 序号 | 物料名称 | 规格型号 | 数量 | 原产商 | ||||
| 机器人焊接工作站 | ||||||||
| 1 | 六关节工业机器人 | 型号:M-10iA,负载12Kg | 1台 | 上海发那科 | ||||
| 2 | 机器人控制器 | 型号:R-30iA Mate | 1套 | 上海发那科 | ||||
| 3 | 机器人示教器 | 型号:iPendant | 1台 | 上海发那科 | ||||
| 4 | 机器人本体连接电缆 | 与机器人配套 | 1套 | 上海发那科 | ||||
| 5 | 机器人示教器连接电缆 | 与机器人配套 | 1套 | 上海发那科 | ||||
| 6 | 机器人固定底座 | 型号:BDT-131A-RBDZ | 1块 | 佛山隆深 | ||||
| 7 | 焊接电源 | 型号:YD-350GR | 1套 | 唐山松下 | ||||
| 8 | 送丝装置 | 型号:YW-35DG1HAE | 1套 | 唐山松下 | ||||
| 9 | 风冷式 | 型号:YT-35CS4HAE | 1套 | 唐山松下 | ||||
| 10 | 气体调节器 | 型号:YX-25CD1HAM | 1套 | 唐山松下 | ||||
| 11 | 焊接变位机 | 型号:Positioner,负载500Kg | 1套 | 佛山隆深 | ||||
| 12 | 多功能焊接平台 | 型号:BDT-131A-HJPT | 1套 | 上海文圣 | ||||
| 13 | 焊接固定夹具 | 型号:ES-203F | 20只 | 佛山隆深 | ||||
| 14 | 系统大底板 | 型号:BDT-132A-XTDB | 1套 | 上海文圣 | ||||
| 15 | 安全护栏 | 型号:BDT-131A-BHWL | 1套 | 上海文圣 | ||||
| 16 | 电脑 | 型号:Vostro 3650-R1938 | 1套 | 惠普 | ||||
| 17 | 电气控制系统 | 型号:BDT-131A-Q | 1套 | 上海文圣 | ||||
| 18 | 电气控制柜 | 型号:BDT-131A-DKG | 1套 | 上海文圣 | ||||
| 19 | 电脑桌凳 | 型号:BDT-131-DNZ | 1套 | 上海文圣 | ||||
| 20 | 焊接胚件 | 各类焊接胚件、与设备配套 | 500套 | 上海文圣 | ||||
| 21 | 维修工具套件 | 型号:JEB-F26,26件套 | 1套 | 捷科 | ||||
| 22 | PCL编程电缆 | 型号:PC-PPI | 1根 | 三菱 | ||||
| 23 | 产品说明书 | 与设备配套 | 1套 | 上海文圣 | ||||
| 机器人抛光打磨工作站 | ||||||||
| 24 | 六关节工业机器人 | 型号:IRB1600-10/1.45,负载10Kg | 1台 | 上海ABB | ||||
| 25 | 机器人控制器 | 型号:IRC5紧凑型 | 1套 | 上海ABB | ||||
| 26 | 机器人示教器 | 型号:FlexPendan | 1台 | 上海ABB | ||||
| 27 | 机器人本体连接电缆 | 与机器人配套 | 1套 | 上海ABB | ||||
| 28 | 机器人示教器连接电缆 | 与机器人配套 | 1套 | 上海ABB | ||||
| 29 | 力控打磨抛光机 | 型号:BDT-PAS43B | 1套 | 上海文圣 | ||||
| 30 | 多功能上料平台 | 型号:BDT-132A-SLPT | 1套 | 上海文圣 | ||||
| 31 | 机器人工装夹具 | 型号:BDT-132A-RBJG | 1套 | 上海文圣 | ||||
| 32 | 系统大底板 | 型号:BDT-132A-XTDB | 1套 | 上海文圣 | ||||
| 33 | 独立除尘装置 | 型号:BDT-132A-XCQ | 1套 | 上海文圣 | ||||
| 34 | 安全护栏 | 型号:BDT-132A-BHWL | 1套 | 上海文圣 | ||||
| 35 | 电脑 | 型号:Vostro 3650-R1938 | 1套 | 惠普 | ||||
| 36 | 电气控制系统 | 型号:BDT-132A-Q | 1套 | 上海文圣 | ||||
| 37 | 电气控制柜 | 型号:BDT-132A-DKG | 1套 | 上海文圣 | ||||
| 38 | 电脑桌凳 | 型号:BDT-132-DNZ | 1套 | 上海文圣 | ||||
| 39 | 打磨胚件 | 水龙头打磨毛胚件 | 500套 | 上海文圣 | ||||
| 40 | 维修工具套件 | 型号:JEB-F26,26件套 | 1套 | 捷科 | ||||
| 41 | PCL编程电缆 | 型号:PC-PPI | 1根 | 三菱 | ||||
| 42 | 产品说明书 | 与设备配套 | 1套 | 上海文圣 | ||||
四、实训项目
(一)机器人焊接工作站
1、工业机器人的基本认识。
2、工业机器人示教器运动操作。
3、工业机器人的点位示教。
4、工业机器人基本接线方法。
5、工业机器人弧焊I/O配置及参数设置。
6、工业机器人常用弧焊指令的学习。
7、工业机器人常用弧焊数据学习。
8、机构的使用。
9、弧焊应用任务实施。
10、弧焊程序模板导入。
11弧焊应用标定。
(二)机器人抛光打磨工作站
1、工业机器人的基本认识。
2、工业机器人示教器运动操作。
3、工业机器人的点位示教。
4、工业机器人基本接线方法。
5、工业机器人打磨I/O配置及参数设置。
6、工业机器人奇异点管理。
7、工业机器人限制关节轴的运动范围。
8、工业机器人打磨应用任务实施。
9、工业机器人常用运动指令的学习。
10、工业机器人常用逻辑指令的学习。









